Inserito il
10/10/2004
Rev. 3
Astronomia e
motorizzazioni in pillole
Alla fine degli
anni ’50 molti astrofili iniziarono a sentire il bisogno di inseguire il moto
degli astri per poter effettuare delle foto decenti senza le classiche comete
onnipresenti. Le pellicole erano quello che erano e salendo con gli ASA le
immagini si sgranavano in maniera preoccupante già dopo i 100. E con 100 ASA
senza inseguimento la Luna era l’unico target possibile.
Per inseguire i
target occorreva un motore, anche uno solo magari, posto nell’asse di
ascensione retta, e che si muovesse al ritmo della sfera celeste, ovvero
qualche minuto meno di 24 ore per compiere un giro completo di 360 gradi.
Facile a dirsi ma meno a farsi allora.
Sistemi a base dei tempi controllata
La prima
soluzione fu ovviamente quella dell’orologio a bilanciere di cospicue
dimensioni. Una orologione per dirla scherzando.
La soluzione,
precisione a parte, era complessa, costosa e poco pratica. Non so quanti utenti
ci siano che abbiano sperimentato questi meccanismi primitivi di inseguimento,
ma penso pochi tra noi.
La soluzione
seguente fu ovviamente quella dei motori sincroni con la rete: 50Hz in Europa e
60Hz in USA. La rete, anche se molti non lo sanno genera una frequenza, il 50 o
60 hertz, con una precisione incredibile. Per trovare un errore nella frequenza
occorre andare alla terza o quarta cifra decimale. Non poco e comunque
sufficiente a esposizioni di qualche minuto.
Purtroppo i
meccanismi erano condizionati dal bisogno di lunghe catene di riduzione poiché
i motori avevano un numero di giri
abbastanza elevato, almeno se si voleva una coppia sufficiente alla bisogna.
E le riduzioni
avevano un problema. O erano costosissimi meccanismi da orologiaio, quindi
inavvicinabili dal dilettante o erano carenti in precisione. Vedi laschi,
inerzie, viscosità, flessibilità degli alberi eccetera.
Certo, un giro lo
facevano sempre nel solito tempo ma sperare nelle precisioni di primi o
addirittura dei secondi d’arco in una ben delimitata zona di rotazione era
utopistico.
Inoltre, e non
era cosa da poco, questi sistemi richiedevano una presa della corrente vicina,
e quindi addio la trasportabilità. C’erano è vero gli inverter a batterie, già
allora, da collegare all’accendisigari della macchina, ma la loro precisione
era ridicola se non quarzati, e se lo erano il costo volava.
La soluzione costosa
L’unica soluzione
seria per risolvere il problema dell’inseguimento era quella di una catena
servo tecnica completa, ovvero di qualcosa di simile a quanto mostrato in
figura.
In pratica la
catena è costituita da un motore, qualunque, da una catena di riduzione,
anch’essa qualunque, entro certi limiti, e da un sensore di posizione.
Con questo
sistema è possibile usare ingranaggi a recupero del gioco con molle o altri
simili espedienti per migliorare la fluidità e la precisione, senza introdurre
errori.
Tutto questo è
collegato ad un blocco di elettronica, chiamata in gergo servo, che controlla
la posizione e comanda il motore in maniera che esso sia sempre nel posto
giusto rispetto all’asse che è l’uscita di tutta la macchina. Il comando è
ovviamente quello dall’utente o del suo, eventuale computer di controllo.
Ovvio che tutta
la precisione del sistema risiede nel blocco Posizione, quello che cioè ci indica dove l’asse
sia in quel momento. Sembra una sciocchezza ma un resolver, così viene
chiamato, che indichi i secondi d’arco costa una follia. Diciamo che oggi siamo
nell’ordine dei 2 o 3 mila € quando và bene. Si può spendere anche molto meno,
ma la precisione cade di schianto a frazioni di grado, altro che secondi!
Inoltre, per poter leggere un simile dispositivo, occorre un’elettronica capace
di precisioni da laboratorio, con convertitori A/D a 5 cifre. È vero che si
possono usare encoder ottici ma, attenzione, o sono dei semplici sistemi ad
ingranaggi, ed allora il problema non lo si risolve più, o sono oggetti che
costano il doppio dello specchio da 300mm che volete pilotare!
La soluzione attuale
Tutto rimase così
nel libro dei sogni degli astrofili fino all’avvento dei microprocessori a
basso costo. Gli americani ebbero una idea, risultata poi geniale, di evitare i
costosi “resolver” e di usare l’occhio dell’utente come risolutore assoluto, e
il microprocessore come memoria degli errori. Geniale davvero.
In pratica tutti
i telescopi motorizzati, almeno tutti quelli dilettantistici, sono costruiti
con questo sistema.
Facciamo un passo
indietro. Un servo è preciso ne più ne meno come
E = p – c
Dove E è
l’errore, p la posizione e c il comando. Ovvio direte. Si, purtroppo come
abbiamo visto la differenza tra questi due parametri è assai costosa da leggere
e controllare. Come fare allora? Semplice con la seguente asserzione.
E = p + f(φ) – c
Questa è la
semplice formula usata dai costruttori per risolvere con pochi spiccioli il
problema. Tutto sta, ovviamente nel termine, un po’ oscuro di f(φ) . vediamo un po’ meglio cosa vuol dire.
Ma come funziona l’arcano?
La cosa è più
complessa di quello che sembra, ma semplicissima per chi la usa.
Una volta puntato
il tele sul celo, l’elettronica assume come punto iniziale del movimento quello
che voi gli direte essere una certa posizione DEC/RA. Il processore se la segna
da una parte come f(φ0) = 0 e vi chiede di inquadrare qualcos’altro.
Quando gli direte che lo avete nel centro del reticolo il processore farà due
conti e capirà quanti giri, spesso molte migliaia del motore, ha fatto per
arrivarci. In pratica calcola quello che c’è in mezzo tra lo zero e la nuova
posizione che ha raggiunto con errore rispetto al teorico calcolato di f(φ1)
= e1 .
Continuando con
altre osservazioni, diciamo così di prova, alla fine egli, il processore, si
costruirà una curva chiamata di non linearità. Una curva che, a seconda della qualità
dello strumento, tiene in memoria una serie di
f(φ0),
f(φ1)= e1, f(φ2)
= e2, f(φ3) =
e3, f(φ4) = e4
eccetera …..
È chiaro che la
precisione del meccanismo usato può essere anche assai povera, e quindi
così è per ragioni di
costo.
Non ci si può
aspettare una risoluzione a tutto campo di secondi d’arco. Di sicuro però,
all’interno di quello che gli abbiamo “insegnato” lui, il tele, ci seguirà con errori
davvero molto bassi. Specie se si considera che il tutto è fatto con componenti
molto economici, abbastanza da permettere oramai a tutti di possedere uno
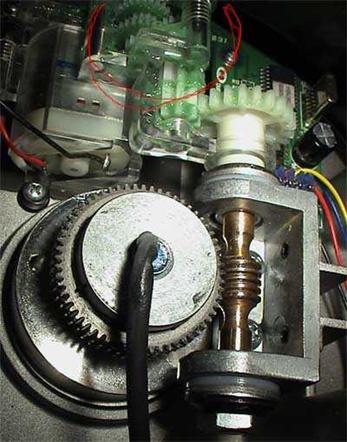
strumento del genere. Pensate che per ottenere queste precisioni, 50 anni fa, si
spendevano cifre da capogiro. A volte centinaia di migliaia di dollari
d’allora! Nella foto successiva, tratta da Internet, un esempio di meccanica di
telescopio di tipo GOTO. Si vede bene come i componenti siano assai economici
ma evidentemente efficaci.
Il GOTO
Era il passo
successivo e inevitabile. Dotando infatti lo strumento di una montatura
alt-azimutale, e di due motori, sia per RA che la DEC era infatti possibile
insegnare al tele non solo a muoversi con precisione ma anche, grazie ai micro
computer di trovare gli oggetti dei nostri desideri. Per farlo bastava inserire
nella memoria del micro le posizioni assolute dei copri celesti e dirgli quindi
dove siamo, latitudine e longitudine, che data è e che ore sono. Il gioco è
fatto. Due conti e l’oggetto cade dentro il reticolo del cercatore. Ovvio che
solo dopo avere ben istruito il processore la cosa funziona, ma basta poco per
prendere pratica in questa lezione all’elettronica e dopo tutto è assai più
facile. Ecco l’oggetto dei desideri di quasi tutti gli astrofili. Mi scuso con
gli altri produttori se unisco solo questa immagine. Di marche ce ne sono molte
altre.

Conclusioni
Sono molti gli
astrofili che si dicono nemici di questi sistemi automatizzati, e non posso dar
loro torto. È un po’ come cercare di convincere un appassionato orologiaio che
sono meglio gli orologi al quarzo di quelli col bilanciere. Sarà magari anche
vero ma il fascino del tic-tac non c’è più… E lo capisco, anche se, per la mia
professione, non dovrei dirlo. Rimane l’indiscutibile fatto che nel mondo
caotico e convulso di oggi, avere uno strumento che in dieci minuti è in
batteria senza problemi e cerca, e trova, gli oggetti in pochi secondi è un
vantaggio insuperabile. Io non sono indicato, comunque, per dare consigli a
nessuno.
Aggiunta
doverosa:
ovvero
affidabilità e durata di questi congegni
Tutto quanto
visto ha un prezzo in termini di affidabilità non da poco. Tanto per essere
chiari basti pensare che il mio primo telescopio, regalatomi da mio padre
..anta anni fa, è ancora lì, piccolo e semplice, ma ancora lì su di un mobile,
perfettamente uguale a quando mi fu regalato. Ciò che acquistiamo oggi non
durerà certo quanto quel rifrattore giapponese…
Extra tensioni in agguato
Spesso però molto
è dovuto a noi e al nostro modo di usare le cose senza conoscerle per bene. Ad
esempio è comune sentir dire di gente che stacca o attacca la tensione esterna
al telescopio come se fosse un aspirapolvere. NON È COSI’!
Ogni volta che
facciamo questa operazione, e lo strumento è su ON diamo uno shock elettrico a
tutte le sue parti, a causa della induttanza del circuito che, specie se la
tensione la leviamo, subisce una extra tensione in grado di danneggiarlo. Avete
mai sentito dire di utenti che hanno dovuto, dopo una di queste operazioni
animalesche, riprogrammare tutto lo strumento perché memoria dei dati e del
programma se ne erano andati? Leggete i post dei gruppi di discussione e ne
sentirete delle belle. Ovvio che ogni qual volta facciamo questo il nostro
strumento invecchia di colpo di anni. Se poi muore, non ci lamentiamo.
Stessa cosa vale
ovviamente per i cavi esterni, nel caso ci siano, penso all’LXD55 per esempio,
per alimentare i motori. In questo caso lo shock lo prende il driver di potenza
e la fine è la solita. Mai staccare le connessioni a macchina in funzione.
Per quanto
riguarda poi il collegamento ai Pc o peggio al tastierino numerico del
controller, ovvio il riferimento a Celestron e Meade, aprire il collegamento a
macchina accesa è del tutto stupido. Pensate che in un gruppo USA ho letto che
ci si diverte a fare gare su chi possiede lo strumento che, con controller
staccato, sbanda meno…
Roba che nemmeno
sul pianeta delle scimmie si sentirebbe.
Ovvio che il guasto
è in agguato.
I blocchi meccanici
Altro errore è
bloccare lo strumento con un fermo di qualche tipo, ovviamente meccanico, e poi
lasciarlo, magari per una lunga esposizione col CCD, incustodito. Se la
macchina non trova i fondo corsa propri e non sa cosa è che la frena tenterà
lungamente di spingere verso l’ostacolo. Il risultato è un surriscaldamento dei
motori e la morte successiva, se siete fortunati, del driver, che costa due
soldi, oppure del motore, e allora sono dolori.
La temperatura
Altra scemenza
tipica, che ho letto più volte, è accendere lo strumento in regimi termici
assurdi. Ricordo ancora il post di un tale che chiamava gli amici per fargli
vedere i caratteri, secondo lui cirillici, sul tastierino, quando la
temperatura era particolarmente bassa. È bene dire subito che l’elettronica,
quella consumer voglio dire, non è in grado di funzionare
correttamente al di fuori di range che vanno da +°5, o al massimo °0, e i +°50
a volere esagerare.
Andare fuori da
questi range significa stressare le parti oltre ogni senso, e quindi, in ultima
analisi danneggiarle. Se il tastierino scrive cirillico,
è perché l’elettronica non è in grado di svegliarsi adeguatamente e va, come si
dice in gergo “in palla”. Insistere vuol dire trovarsi prima o poi con qualcosa
di rotto.
Gli shock meccanico termici
Un’altra fonte di
guai viene dagli shock meccanici, o peggio termici perché più subdoli, che
diamo al nostro strumento. Fino a qualche anno fa l’unica cosa che potevano
fare era battere in terra lo strumento stesso, cosa che capivamo bene non fosse
quella giusta o scuoterlo, magari in auto per chilometri e chilometri senza
troppe cautele. Se non si disallineava, o rompeva qualcosa, eravamo a posto.
Oggi non è più
così. Ad esempio sono molto comuni gli eleganti, otticamente, strumenti tipo
Schmidt o Maksutov oggetti che hanno una quasi sigillatura del tubo ottico.
Quasi perché è aperto dietro. È proprio nel quasi che nasce il problema.
Uno shock termico
creerà di sicuro problemi di condensa, e alla lunga, un danneggiamento delle
parti ottiche, leggi finitura, interne. Questo non era mai un problema con i
vecchi ed economici Newton ma diventa un problema ora.
Peggio che mai
per la elettro meccanica. Qui circuiti stampati, in gergo pcb, motori e
ingranaggi finiscono a “guazzo” con risultati drammatici. Anche gli
impatti meccanici possono generare problemi a non finire. All’interno della
macchina ci sono infatti connettori, parti saldate e altro che, sottoposte a
impatti o shock meccanici possono smettere di funzionare. E spesso, come accade
in elettronica, questi malfunzionamenti sono di tipo degenerativo. Tu stacchi
il fine corsa, e si brucia il motore. Tu stacchi il current sens
dell’alimentatore e ti parte tutta la scheda. Occhio quindi se siete dei
ciabattoni di natura. (Come me!)
Mai generare
questi eventi sia termici che meccanici con i moderni strumenti.
Come tutte le cose più sono complesse più
sono delicate.
Paolo Lavacchini